Haptic Exo-Glove Research



A feeling like no other.
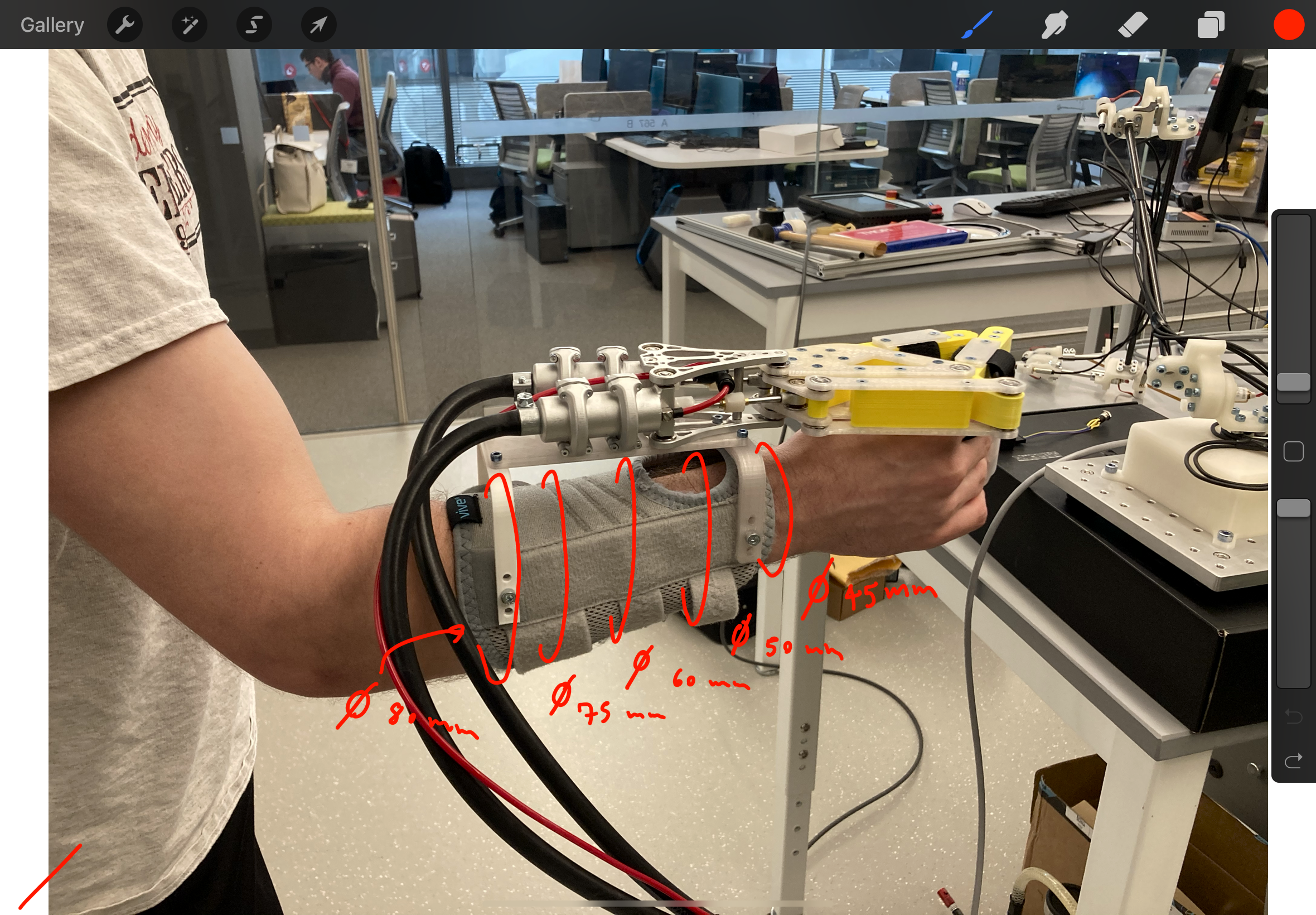
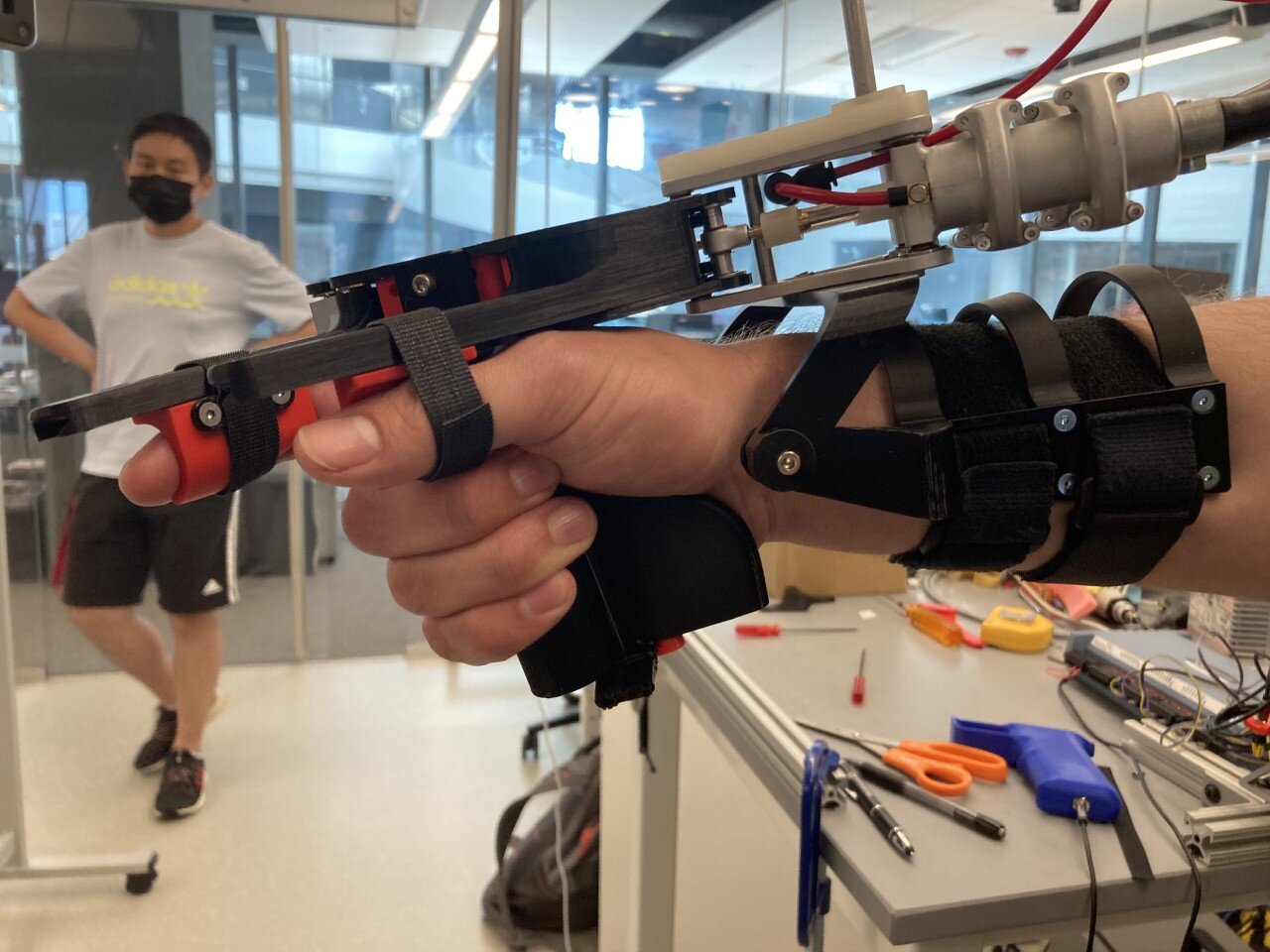
As a research assistant under Professor Peter Whitney in the ISEC Robotics Collaborative at Northeastern, I have had the opportunity to develop a state of the art haptic “Exo-Glove”. This teleoperated system allows the user to feel the size and texture of objects from a remote location. I am currently a finalist on Team Northeastern in the $10 ANA XPRIZE Avatar competition, and am actively working on upgrading this design.
XPRIZE 3rd Place Semifinals Design



Ongoing Iteration